Loading...
Searching...
No Matches
stw::DynamicsWorld Class Reference
A world with dynamics in it. More...
#include <DynamicsWorld.hpp>
Inheritance diagram for stw::DynamicsWorld:
Collaboration diagram for stw::DynamicsWorld:
Public Member Functions | |
| void | AddRigidbody (Rigidbody *rigidbody) |
| Adds a rigidbody in the world. | |
| void | ApplyGravity () const |
| Applies the gravity to all the rigidbody. | |
| void | MoveBodies (float deltaTime) const |
| Moves all the rigidbodies. | |
| void | Step (float deltaTime) |
| Steps the world. | |
| void | SetWorldGravity (Vector2 gravity) |
| Sets the gravity in the world. | |
 Public Member Functions inherited from stw::CollisionWorld Public Member Functions inherited from stw::CollisionWorld | |
| CollisionWorld () | |
| CollisionWorld (std::unordered_map< std::uint64_t, CollisionBody * > bodies, std::vector< Solver * > solvers) | |
| void | AddCollisionBody (CollisionBody *body) |
| Adds a collision body to the world. | |
| void | RemoveCollisionBody (const CollisionBody *body) |
| Removes a collision body to the world. | |
| void | AddSolver (Solver *solver) |
| Adds a solver to the world. | |
| void | RemoveSolver (Solver *solver) |
| Removes the solver from the world. | |
| void | SetCollisionCallback (const std::function< void(Collision &, float)> &callback) |
| Sets the collision callback of this world. | |
| void | SolveCollisions (const std::vector< Collision > &collisions, float deltaTime) const |
| Solves the collisions with the provided solvers. | |
| void | SendCollisionCallbacks (std::vector< Collision > &collisions, float deltaTime) const |
| Calls the callbacks of all the bodies in each collisions. | |
| void | ResolveCollisions (float deltaTime) |
| Resolves all the collisions that happened in this world. | |
| void | FindCollisions (std::uint64_t firstId, std::uint64_t secondId, std::vector< Collision > &collisions, std::vector< Collision > &triggers) |
Additional Inherited Members | |
| Public Attributes inherited from stw::CollisionWorld | |
| bool | useSpacePartitioning = true |
| Protected Attributes inherited from stw::CollisionWorld | |
| std::unordered_map< std::uint64_t, CollisionBody * > | _bodies |
| std::vector< Solver * > | _solvers |
| BroadPhaseGrid | _grid |
| std::function< void(Collision &, float) | _onCollision ) |
Detailed Description
A world with dynamics in it.
Member Function Documentation
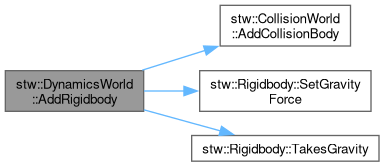
◆ AddRigidbody()
| void stw::DynamicsWorld::AddRigidbody | ( | Rigidbody * | rigidbody | ) |
Adds a rigidbody in the world.
- Parameters
-
rigidbody Rigidbody to add.
Here is the call graph for this function:
◆ ApplyGravity()
| void stw::DynamicsWorld::ApplyGravity | ( | ) | const |
Applies the gravity to all the rigidbody.
◆ MoveBodies()
| void stw::DynamicsWorld::MoveBodies | ( | float | deltaTime | ) | const |
Moves all the rigidbodies.
- Parameters
-
deltaTime Time elapsed since the last frame.
◆ SetWorldGravity()
| void stw::DynamicsWorld::SetWorldGravity | ( | Vector2 | gravity | ) |
Sets the gravity in the world.
- Parameters
-
gravity Gravity to set.
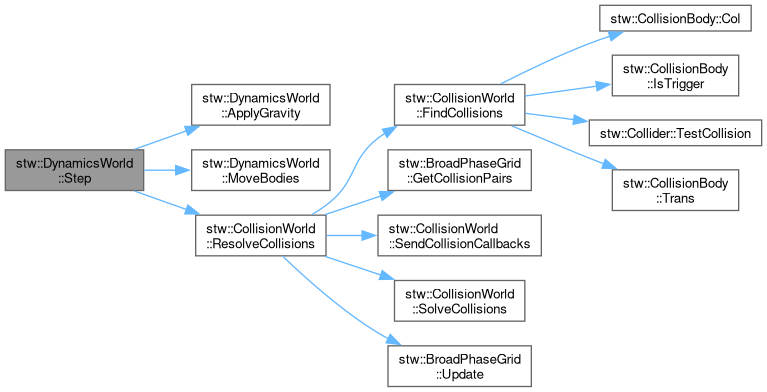
◆ Step()
| void stw::DynamicsWorld::Step | ( | float | deltaTime | ) |
Steps the world.
- Parameters
-
deltaTime Time elapsed since the last frame.
Here is the call graph for this function:
The documentation for this class was generated from the following files:
- include/dynamics/DynamicsWorld.hpp
- src/dynamics/DynamicsWorld.cpp