A Rigidbody that has dynamics. More...
#include <Rigidbody.hpp>
Public Member Functions | |
| Rigidbody () | |
| const Vector2 & | GravityForce () const |
| Gets the force of the gravity on this body. | |
| void | SetGravityForce (const Vector2 &gravityForce) |
| Sets the gravity force. | |
| const Vector2 & | Force () const |
| Gets the force on this body. | |
| void | ApplyForce (const Vector2 &addedForce) |
| Adds force to this body. | |
| void | SetForce (const Vector2 &force) |
| Sets the force of this body. | |
| const Vector2 & | Velocity () const |
| Gets the velocity of this body. | |
| void | SetVelocity (const Vector2 &velocity) |
| Sets the velocity of this body. | |
| float | Mass () const |
| Computes the mass of this body. Only the inverted mass is stored, so it's computed as 1 / InvMass();. | |
| float | InvMass () const |
| Returns 1 / Mass of this body. | |
| void | SetMass (float mass) |
| Sets the mass of this body. | |
| bool | TakesGravity () const |
| Gets a boolean indicating whether this body takes gravity. | |
| void | SetTakesGravity (bool takesGravity) |
| Sets a boolean indicating whether this body takes gravity. | |
| float | StaticFriction () const |
| Gets the static friction of this body. | |
| void | SetStaticFriction (float staticFriction) |
| Sets the static friction of this body. | |
| float | DynamicFriction () const |
| Gets the dynamic friction of this body. | |
| void | SetDynamicFriction (float dynamicFriction) |
| Sets the dynamic friction of this body. | |
| float | Restitution () const |
| Gets the restitution of this body. Can be seen as the "Bounciness". | |
| void | SetRestitution (float restitution) |
| Sets the restitution of this body. Can be seen as the "Bounciness". | |
 Public Member Functions inherited from stw::CollisionBody Public Member Functions inherited from stw::CollisionBody | |
| CollisionBody () | |
| Transform * | Trans () |
| Gets the transform of the body. | |
| void | SetTransform (const Transform &transform) |
| Sets the transform of the body. | |
| Collider * | Col () const |
| Gets the collider of the body. | |
| void | SetCollider (Collider *collider) |
| Sets the collider of the body. | |
| bool | IsTrigger () const |
| A boolean saying if the collider is a trigger collider. This means that it will not have a collision response and will only have a callback. | |
| void | SetIsTrigger (bool isTrigger) |
| Sets is trigger on the body. True means that it will not have a collision response and will only have a callback. | |
| void | SetCollisionCallback (const std::function< void(const Collision &, float)> &callback) |
| Sets the collision callback function. | |
| void | OnCollision (const Collision &collision, float deltaTime) const |
| Triggers the collision callback function. | |
| const Vector2 & | Position () const |
| Gets the position of the body in the world. | |
| void | SetPosition (const Vector2 &position) |
| Sets the position of the body in the world. | |
| bool | IsKinematic () const |
| Gets a boolean that indicates if this body will receive a collision response. | |
| void | SetIsKinematic (bool isKinematic) |
| Sets a boolean that indicates if this body will receive a collision response. | |
| bool | IsDynamic () const |
| Gets a boolean indicating if this body is dynamic. This means that this is a Rigidbody. | |
Additional Inherited Members | |
| Public Attributes inherited from stw::CollisionBody | |
| std::uint64_t | id |
| Protected Attributes inherited from stw::CollisionBody | |
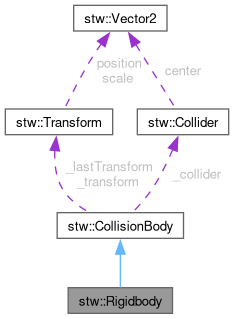
| Transform | _transform {} |
| Transform | _lastTransform {} |
| Collider * | _collider {} |
| bool | _isTrigger = false |
| bool | _isKinematic = false |
| bool | _isDynamic = false |
| std::function< void(const Collision &, float) | _onCollisions ) |
Detailed Description
A Rigidbody that has dynamics.
Constructor & Destructor Documentation
◆ Rigidbody()
| stw::Rigidbody::Rigidbody | ( | ) |
Member Function Documentation
◆ ApplyForce()
| void stw::Rigidbody::ApplyForce | ( | const Vector2 & | addedForce | ) |
Adds force to this body.
- Parameters
-
addedForce The force to add to this body.
◆ DynamicFriction()
| float stw::Rigidbody::DynamicFriction | ( | ) | const |
Gets the dynamic friction of this body.
- Returns
- The dynamic friction.
◆ Force()
| const Vector2 & stw::Rigidbody::Force | ( | ) | const |
Gets the force on this body.
- Returns
- The force on this body.
◆ GravityForce()
| const Vector2 & stw::Rigidbody::GravityForce | ( | ) | const |
Gets the force of the gravity on this body.
- Returns
- The force of the gravity.
◆ InvMass()
| float stw::Rigidbody::InvMass | ( | ) | const |
Returns 1 / Mass of this body.
- Returns
- The inverted mass of this body.
◆ Mass()
| float stw::Rigidbody::Mass | ( | ) | const |
◆ Restitution()
| float stw::Rigidbody::Restitution | ( | ) | const |
Gets the restitution of this body. Can be seen as the "Bounciness".
- Returns
- The restitution.
◆ SetDynamicFriction()
| void stw::Rigidbody::SetDynamicFriction | ( | float | dynamicFriction | ) |
Sets the dynamic friction of this body.
- Parameters
-
dynamicFriction The new dynamic friction.
◆ SetForce()
| void stw::Rigidbody::SetForce | ( | const Vector2 & | force | ) |
Sets the force of this body.
- Parameters
-
force The new force.
◆ SetGravityForce()
| void stw::Rigidbody::SetGravityForce | ( | const Vector2 & | gravityForce | ) |
Sets the gravity force.
- Parameters
-
gravityForce New gravity force.
◆ SetMass()
| void stw::Rigidbody::SetMass | ( | float | mass | ) |
Sets the mass of this body.
- Parameters
-
mass The new mass.
◆ SetRestitution()
| void stw::Rigidbody::SetRestitution | ( | float | restitution | ) |
Sets the restitution of this body. Can be seen as the "Bounciness".
- Parameters
-
restitution The new restitution.
◆ SetStaticFriction()
| void stw::Rigidbody::SetStaticFriction | ( | float | staticFriction | ) |
Sets the static friction of this body.
- Parameters
-
staticFriction The new static friction.
◆ SetTakesGravity()
| void stw::Rigidbody::SetTakesGravity | ( | bool | takesGravity | ) |
Sets a boolean indicating whether this body takes gravity.
- Parameters
-
takesGravity The new takesGravity.

◆ SetVelocity()
| void stw::Rigidbody::SetVelocity | ( | const Vector2 & | velocity | ) |
Sets the velocity of this body.
- Parameters
-
velocity The new velocity.
◆ StaticFriction()
| float stw::Rigidbody::StaticFriction | ( | ) | const |
Gets the static friction of this body.
- Returns
- The static friction.
◆ TakesGravity()
| bool stw::Rigidbody::TakesGravity | ( | ) | const |
Gets a boolean indicating whether this body takes gravity.
- Returns
- True if this body takes gravity.
◆ Velocity()
| const Vector2 & stw::Rigidbody::Velocity | ( | ) | const |
Gets the velocity of this body.
- Returns
- The velocity of this body.
The documentation for this struct was generated from the following files:
- include/dynamics/Rigidbody.hpp
- src/dynamics/Rigidbody.cpp