Loading...
Searching...
No Matches
ManifoldFactory.hpp File Reference
Contains the algo namespace which contains the functions to detect a collision. More...
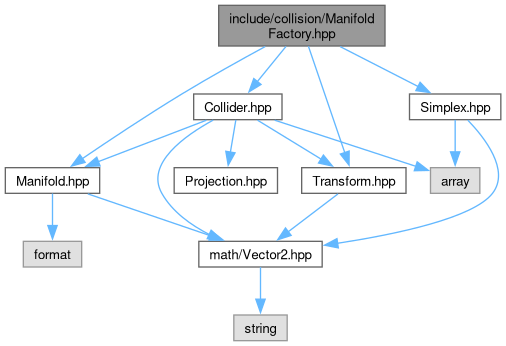
Include dependency graph for ManifoldFactory.hpp:
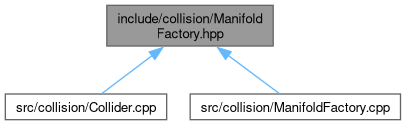
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Namespaces | |
| namespace | stw |
| namespace | stw::algo |
| Namespace containing all the methods to get manifolds from collisions. This is here to separate the logic from the Collider class. Avoids the problem where we don't know if the circle-box collision resolution should be in the CircleCollider class or the box ColliderClass. | |
Functions | |
| Manifold | stw::algo::FindCircleCircleManifold (const CircleCollider *a, const Transform *ta, const CircleCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Manifold | stw::algo::FindCircleBoxManifold (const CircleCollider *a, const Transform *ta, const BoxCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Manifold | stw::algo::FindBoxCircleManifold (const BoxCollider *a, const Transform *ta, const CircleCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Manifold | stw::algo::FindBoxBoxManifold (const BoxCollider *a, const Transform *ta, const BoxCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Manifold | stw::algo::FindAabbAabbManifold (const AabbCollider *a, const Transform *ta, const AabbCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Manifold | stw::algo::FindAabbCircleManifold (const AabbCollider *a, const Transform *ta, const CircleCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Manifold | stw::algo::FindCircleAabbManifold (const CircleCollider *a, const Transform *ta, const AabbCollider *b, const Transform *tb) |
| Finds the collision manifold between A and B. | |
| Vector2 | stw::algo::Support (const Collider *colliderA, const Transform *transformA, const Collider *colliderB, const Transform *transformB, const Vector2 &direction) |
| Support function of the GJK algorithm. | |
| Manifold | stw::algo::Gjk (const Collider *colliderA, const Transform *transformA, const Collider *colliderB, const Transform *transformB) |
| Finds the manifold between A and B using GJK. | |
| bool | stw::algo::NextSimplex (const Simplex &points, Vector2 &direction) |
| Finds the next simplex for the GJK algorithm. | |
| bool | stw::algo::SameDirection (Vector2 direction, Vector2 ao) |
| Finds if both vectors are going in the same direction. | |
| bool | stw::algo::Line (const Simplex &points, Vector2 &direction) |
| Line case for the NextSimplex function. | |
| bool | stw::algo::Triangle (const Simplex &points, Vector2 &direction) |
| Triangle case for the NextSimplex function. | |
| Manifold | stw::algo::Epa (const Simplex &simplex, const Collider *colliderA, const Transform *transformA, const Collider *colliderB, const Transform *transformB) |
| Find the manifold from the last simplex of the GJK algorithm. | |
| Manifold | stw::algo::Sat (const BoxCollider *colliderA, const Transform *transformA, const BoxCollider *colliderB, const Transform *transformB) |
Detailed Description
Contains the algo namespace which contains the functions to detect a collision.
- Version
- 1.0
- Date
- 05.07.2022
- Copyright
- SAE (c) 2022