Loading...
Searching...
No Matches
stw::BoxCollider Class Referencefinal
A rotatable box collider. More...
#include <Collider.hpp>
Inheritance diagram for stw::BoxCollider:
Collaboration diagram for stw::BoxCollider:
Public Member Functions | |
| Manifold | TestCollision (const Transform *transform, const Collider *collider, const Transform *colliderTransform) const override |
| Tests the collision against a generic collider. | |
| Manifold | TestCollision (const Transform *transform, const BoxCollider *collider, const Transform *boxTransform) const override |
| Tests the collision against a box collider. | |
| Manifold | TestCollision (const Transform *transform, const CircleCollider *collider, const Transform *circleTransform) const override |
| Tests the collision against a circle collider. | |
| Manifold | TestCollision (const Transform *transform, const AabbCollider *collider, const Transform *circleTransform) const override |
| Tests the collision against a aabb collider. | |
| Vector2 | FindFurthestPoint (const Transform *transform, const Vector2 &direction) const override |
| Find the furthest point in the specified direction. | |
| std::array< Vector2, 4 > | GetTransformedVertices (const Transform &transform) const |
| Gets the transformed vertices of the box. | |
| std::array< Vector2, 4 > | GetVertices () const |
| Gets the untransformed vertices of the box. | |
| Vector2 | GetBoundingBoxSize () const override |
| Gets the size of the box that surrounds the collider. | |
 Public Member Functions inherited from stw::Collider Public Member Functions inherited from stw::Collider | |
| Collider ()=default | |
| Collider (Collider &&col) noexcept=default | |
| virtual | ~Collider ()=default |
| Collider & | operator= (Collider &&col)=default |
| Collider & | operator= (const Collider &col)=default |
| Collider (const Collider &col)=default | |
Static Public Member Functions | |
| static Projection | Project (const Vector2 &axis, const std::array< Vector2, 4 > &vertices) |
| static std::array< Vector2, 4 > | GetAxes (const std::array< Vector2, 4 > &vertices) |
Public Attributes | |
| float | halfWidth = 0 |
| Half of the width of the box. | |
| float | halfHeight = 0 |
| Half of the height of the box. | |
| Public Attributes inherited from stw::Collider | |
| Vector2 | center {} |
| The center of the collider. | |
Detailed Description
A rotatable box collider.
Member Function Documentation
◆ FindFurthestPoint()
|
overridevirtual |
Find the furthest point in the specified direction.
- Parameters
-
transform The transform of this collider. direction Direction in which to find the furthest point.
- Returns
- The furthest point.
Implements stw::Collider.
Here is the call graph for this function:

◆ GetAxes()
|
static |
Here is the call graph for this function:

◆ GetBoundingBoxSize()
|
overridevirtual |
Gets the size of the box that surrounds the collider.
- Returns
- The bounding box of the collider.
Implements stw::Collider.
◆ GetTransformedVertices()
| std::array< Vector2, 4 > stw::BoxCollider::GetTransformedVertices | ( | const Transform & | transform | ) | const |
Gets the transformed vertices of the box.
- Parameters
-
transform The transform to apply to the collider.
- Returns
- The transform vertices of the box.
Here is the call graph for this function:

◆ GetVertices()
| std::array< Vector2, 4 > stw::BoxCollider::GetVertices | ( | ) | const |
Gets the untransformed vertices of the box.
- Returns
- The vertices of the box.
Here is the call graph for this function:

◆ Project()
|
static |
Here is the call graph for this function:

◆ TestCollision() [1/4]
|
overridevirtual |
Tests the collision against a aabb collider.
- Parameters
-
transform The transform of this collider. collider The circle collider to collide with. aabbTransform The transform of the collider to collide with.
- Returns
- The manifold of that collision.
Implements stw::Collider.
Here is the call graph for this function:

◆ TestCollision() [2/4]
|
overridevirtual |
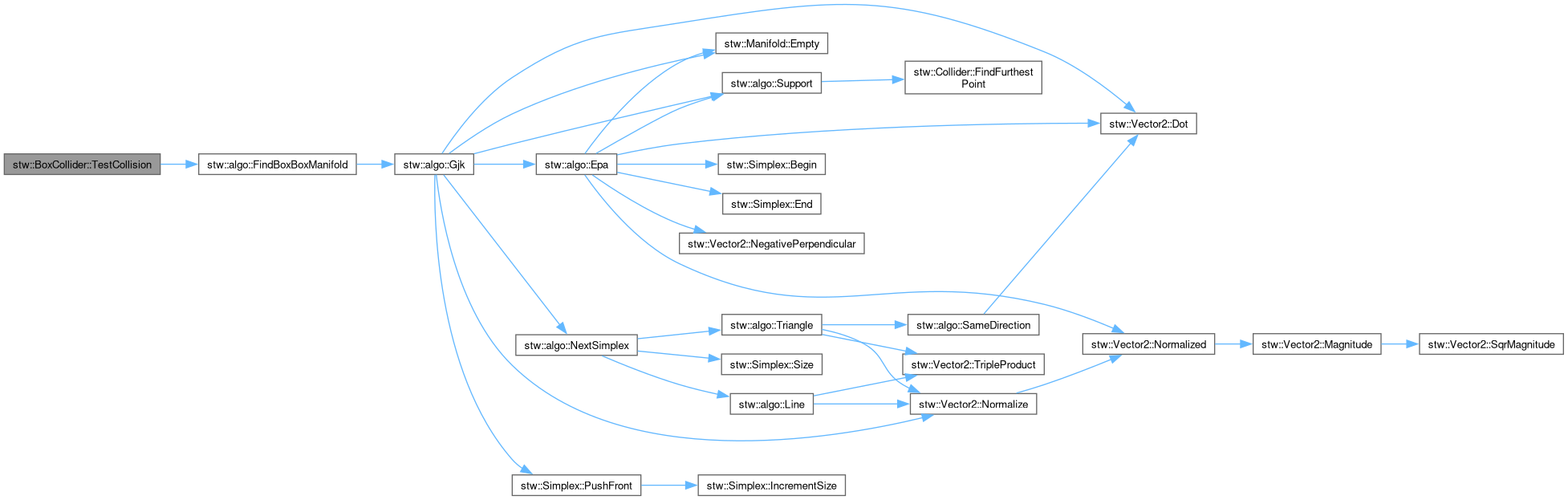
Tests the collision against a box collider.
- Parameters
-
transform The transform of this collider. collider The box collider to collide with. boxTransform The transform of the collider to collide with.
- Returns
- The manifold of that collision.
Implements stw::Collider.
Here is the call graph for this function:
◆ TestCollision() [3/4]
|
overridevirtual |
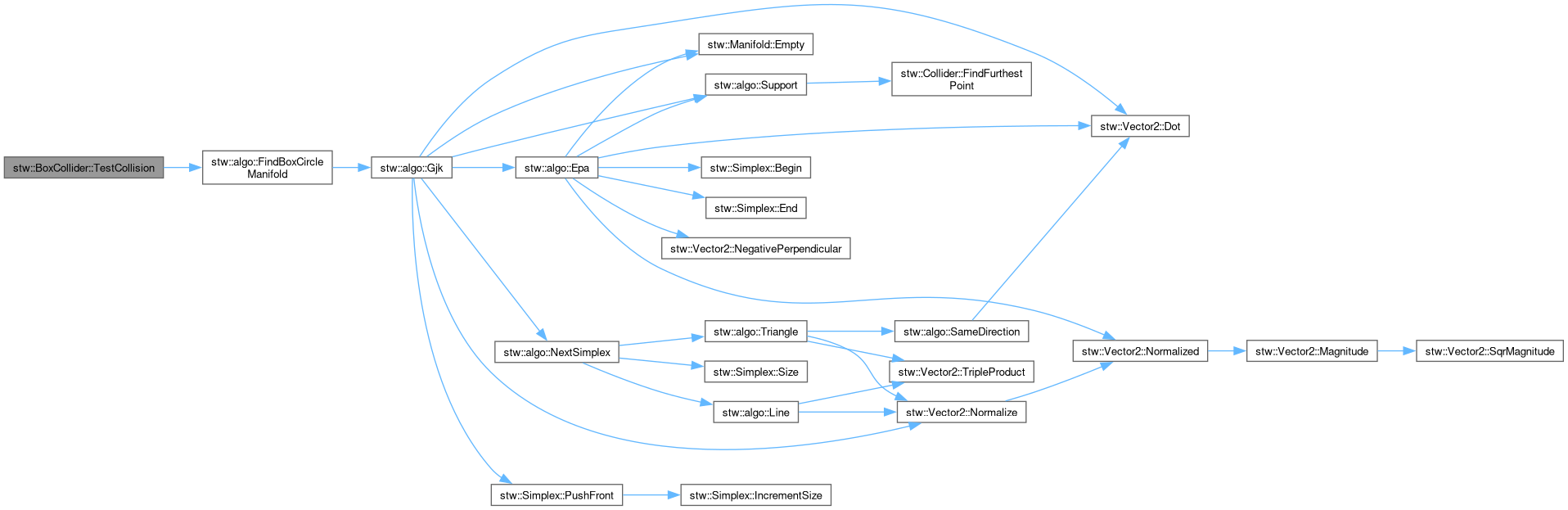
Tests the collision against a circle collider.
- Parameters
-
transform The transform of this collider. collider The circle collider to collide with. circleTransform The transform of the collider to collide with.
- Returns
- The manifold of that collision.
Implements stw::Collider.
Here is the call graph for this function:
◆ TestCollision() [4/4]
|
overridevirtual |
Tests the collision against a generic collider.
- Parameters
-
transform The transform of this collider. collider The collider to collide with. colliderTransform The transform of the collider to collide with.
- Returns
- The manifold of that collision.
Implements stw::Collider.
Here is the call graph for this function:

Member Data Documentation
◆ halfHeight
| float stw::BoxCollider::halfHeight = 0 |
Half of the height of the box.
◆ halfWidth
| float stw::BoxCollider::halfWidth = 0 |
Half of the width of the box.
The documentation for this class was generated from the following files:
- include/collision/Collider.hpp
- src/collision/Collider.cpp